Para que un robot funcione y pueda actuar según los estímulos externos, se colocan en primer lugar unos sensores capaces de captarlos y definir si con este estímulo el robot va a recibir una corriente eléctrica para funcionar o no. A la hora de construir un robot, lo primero que debemos hacer es determinar los estímulos que queremos que el robot tenga en cuenta a la hora de ponerse en funcionamiento. Por ejemplo, si queremos un robot que limpie la casa, podemos tener en cuenta estos tres aspectos: si hay polvo o no (a); si está mojado o no (b), y si huele mal o no (c). Construimos entonces una tabla de verdad en la que colocamos todas las posibles combinaciones de 1 (pasa electricidad) y 0 (no pasa electricidad) que podrían darse y decidimos para cuales queremos que el robot funcione y para cuales no.

Ahora que ya sabemos cuando queremos que haya corriente y cuando no, podemos construir el circuito. Para ello, usamos unos dispositivos llamados puertas lógicas, que pueden modificar la señal dependiendo de cual sea su función. Estos son los distintos tipos de puertas lógicas:
Tiene al menos dos entradas para recibir estímulos. Da una salida (1) cuando llega estímulo por cualquiera de los dos lados o por los dos a la vez. Operación matemática: S=a+b

Solo da salida cuando llega estímulo por todos los sensores a los que está conectada. Operación matemática: S=a·b

Invierte la señal que le llega, es decir: si llega 1 lo convierte en 0 y si llega 0 lo convierte en 1. Operación matemática: S=-a (contrario de a)

Invierte los resultados de la puerta -OR. Operación matemática: S=contrario de a+b

Invierte los resultados de -AND. Operación matemática: S=contrario de a·b

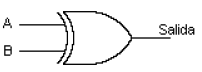
Arroja salida cuando los estímulos son distintos

Para nuestro robot, necesitamos las puertas lógicas necesarias para que siempre recibamos señal excepto cuando todos los estímulos sean 0. Nos quedará un circuito tal que así: